开始复刻
写在前面
- 摸索前行,不断踩坑
- 第一次烧录需要按下BOOT键进入下载模式,再插入USB插口烧录固件
- 烧录固件后才会点亮屏幕,接摄像头才能联网,联网才有声音
功能
sparkbot有很多的功能,但是多个固件没有整合在一起,切换功能需要烧录固件
烧录没有难度,有电脑,插USB线,用相关软件就能烧录。
源码是开源的,有能力的可以二次开发更多的功能
sparkbot的大脑是ESP32-S3 理论上别的ESP32有的功能,我们的sparkbot也都有
小智 AI 聊天机器人
小智百科全书 还能烧录小智的固件进行语音对话,聊天,听歌等
更多小智功能点击这里
各种功能是独立的,如果切换需要重新编译烧录对应的程序 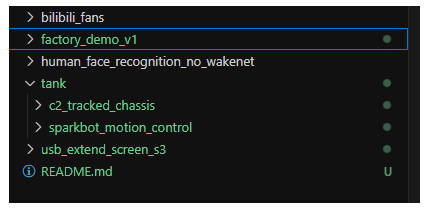
bilibili_fans 哔哩哔哩粉丝牌
factory_demo AI问答,色子 , 2048,木鱼,摄像头
tank下面的 c2_tracked_chassis 刷入小车底座
parkbot_motion_control 把这个刷入头部才能控制小车
usb_extend_screen_s3 当副屏用的,电脑需要安装驱动
从0开始
嘉立创打板PCB
买元件
需要的工具
- 风枪,恒温电烙铁,焊锡丝
- 开孔钢网,锡浆
- 万用表等
焊接

A主板套餐开始
如果板子没有剪开,可以用斜口钳子剪开
插接图如下,千万不要插返,不刷机不亮屏,不插摄像头不能联网

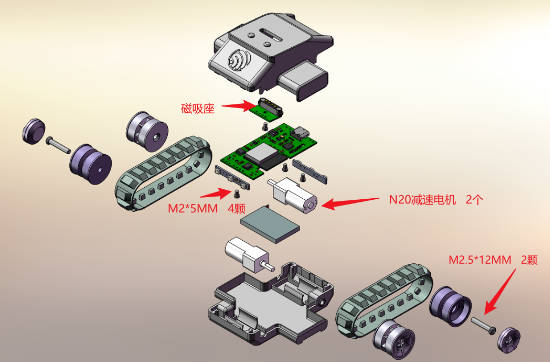
B全套物料
- 全部配件,简单组装就行,前后灯光板和电机需要焊接
- 买元件
- 需要的工具
- 焊接
C成品编译烧录固件
1.源码
ESP-SparkBot 作为小车主控
ESP-SparkBot 底部设计有 4P 磁吸接口(5V/GPIO48/GPIO38/GND),可以将履带小车底盘的 4P 磁吸接口与 ESP-SparkBot 的 4P 磁吸接口连接。本项目使用 UART 通信协议,由 ESP-SparkBot 给履带底盘主控发送控制命令,进而实现运动控制。
语音控制小车
使用 “Hi 乐鑫” 唤醒小车,唤醒后可持续语音控制小车,
目前支持指令:
向前冲 先后退 向左转 向右转 跳个舞
长亮模式 呼吸模式 闪烁模式 灯光秀
唤醒一段时间后,若没有收到命令词,则会退出语音控制模式等待唤醒。
手机控制小车
通过连接到 ESP-SparkBot 的 WebSocket 服务器(手机或电脑连接 Wi-Fi: esp-sparkbot),然后使用浏览器(推荐使用 Chrome 浏览器)打开 WebServer 控制界面(192.168.4.1) 就能实现机器人的运动控制和无线图传,另外还可以拍照和切换灯光效果。
各种功能是独立的,如果切换需要重新编译烧录对应的程序
bilibili_fans 哔哩哔哩粉丝牌
factory_demo AI问答,色子 , 2048,木鱼,摄像头
tank下面的 c2_tracked_chassis 刷入小车底座
parkbot_motion_control 把这个刷入头部才能控制小车
usb_extend_screen_s3 当副屏用的,电脑需要安装驱动
2.编译烧录
必须插好摄像头才能联网
官方编译工具 esp-idf
vscode+idf插件
可以用此BIN文件烧录测试,烧录完成后,
先用手机打开热点测试 ,改为2.4G频段
SSID账号:ZZCW(大写) 密码:88888888(八个8) token已过期,不能反回答案